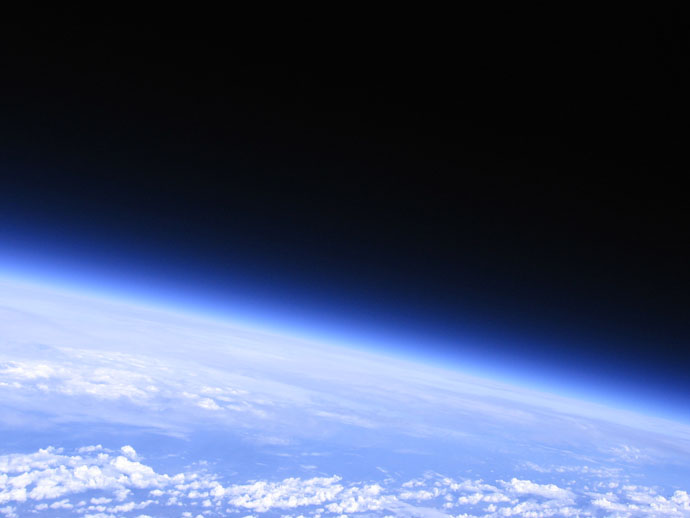
My project launched a payload with GPS, camera, sensors and communications to an altitude of 30km. I obtained most parts ready years ago, but only recently had time to finish it.
High altitude ballooning is an emerging hobby, since price of GPS and communications equipment has gotten quite low. It is an excellent hobby for people fascinated by space flight and telerobotics and has many learning aspects — from systems design to electronics design to software engineering. There is also an exciting risk factor, namely, that you could lose your precious electronics if something malfunctions. In this project, many of my interest and knowledge areas came together. Also, I have verified that the Earth is indeed round and that space is black.
— Alexei Karpenko
http://www.natrium42.com/halo/flight2/
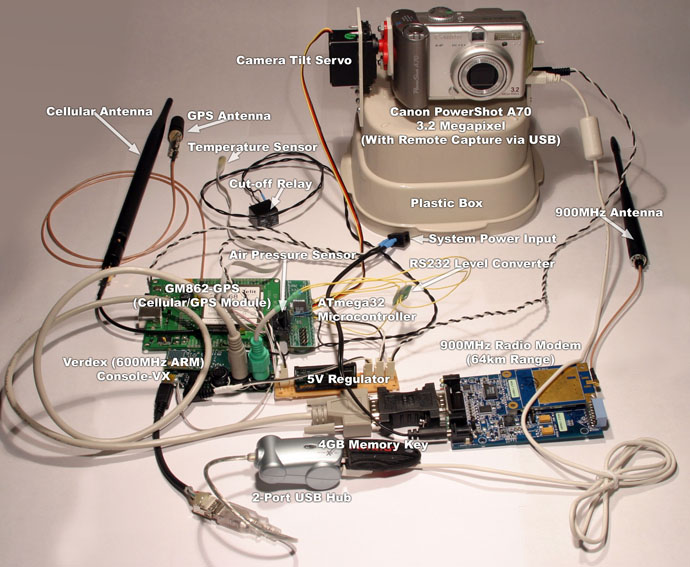
The hardware consisted of a redundant communications and computer system with sensors, servo and camera.
The first communications system consisted of MaxStream XTend — a long-range 900MHz radio transceiver — connected to a Verdex 600MHz single-board ARM computer via serial port. The second communications system was a Telit GM862-GPS cellular module with built-in GPS and built-in python interpreter.
GM862-GPS module was a self-sufficient GPS tracker that would accept requests via SMS and send responses via SMS as well. It also monitored latitude and longitude and performed a payload cutdown when they went over the constraints. That was to prevent landing in a lake, since I am surrounded by them.
Verdex single-board computer controlled the camera, logged GPS positions and sensor data and communicated with the ground via the 900MHz radio modem.
An Atmel ATmega32 microcontroller was used to control two relays (cutdown and camera power), read temperature sensor via SPI, read pressure sensor via ADC and control camera tilt servo. It was connected to the Verdex via serial port. One pin was connected to GM862-GPS so that the module could request a cutdown.
Camera used was a Canon PowerShot A510. Flight 1 used USB to remotely capture pictures from the Verdex and save them on the USB key as well as scale them down for ground downlinking. Unfortunately this system was not very reliable and broke on that flight at an altitude of 6km. So for this flight (Flight 2), I decided to wire the Verdex directly to camera buttons (via GPIO pins) and use electrical signal to "press them." That also had an advantage because I could switch the camera to video mode. The disadvantage was that pictures could no longer be downlinked, since they were stored on a 4GB SD card inserted into the camera. As a fail-safe, camera was regularly restarted by cutting power via a relay.
Pictures

Camera tilted up
Shortly after launch
Compare the size of the balloon here with pictures at high altitude

Camera tilted down
Shortly after launch

Camera tilted sideways
Shortly after launch
It was very humid and hot that day which resulted in very interesting clouds

Camera tilted up

Camera tilted down

Capsule is on the side or upside down?

Camera tilted sideways
Very nice cloud formation

Camera tilted sideways
Lake Huron and coast is visible

Camera tilted sideways

Camera tilted up
Notice how big the balloon is at this altitude — this is because of very low atmospheric pressure
Blackness of space is seen

Camera tilted sideways

Camera tilted sideways

Camera tilted sideways

Camera tilted down
Camera tilted sideways

Camera tilted up
Parachute is open

Camera tilted sideways
Capsule descending quickly

Camera tilted down

Camera tilted sideways

Camera tilted down
Arrow points to the spot where the capsule landed
MVI_0280 from natrium42 on Vimeo.
MVI_0328 from natrium42 on Vimeo.
MVI_0397 from natrium42 on Vimeo.
MVI_0464 from natrium42 on Vimeo.
MVI_0533 from natrium42 on Vimeo.
MVI_0556 from natrium42 on Vimeo.
MVI_0558 from natrium42 on Vimeo.






